3-PRS
The 3-PRS is a three degree-of-freedom parallel manipulator with each leg having a spherical joint, revolute joint, and an actuated prismatic joint. The end effector, once attached to the three legs of the manipulator, is capable of moving in the z-direction (up and down) as well as being able to tip and tilt depending on the position of each leg. In addition to using the end effector as a plate to carry a payoad, the end effector can easily be modified to act as a cutting tool, pneumatic device, or even a visual laser.
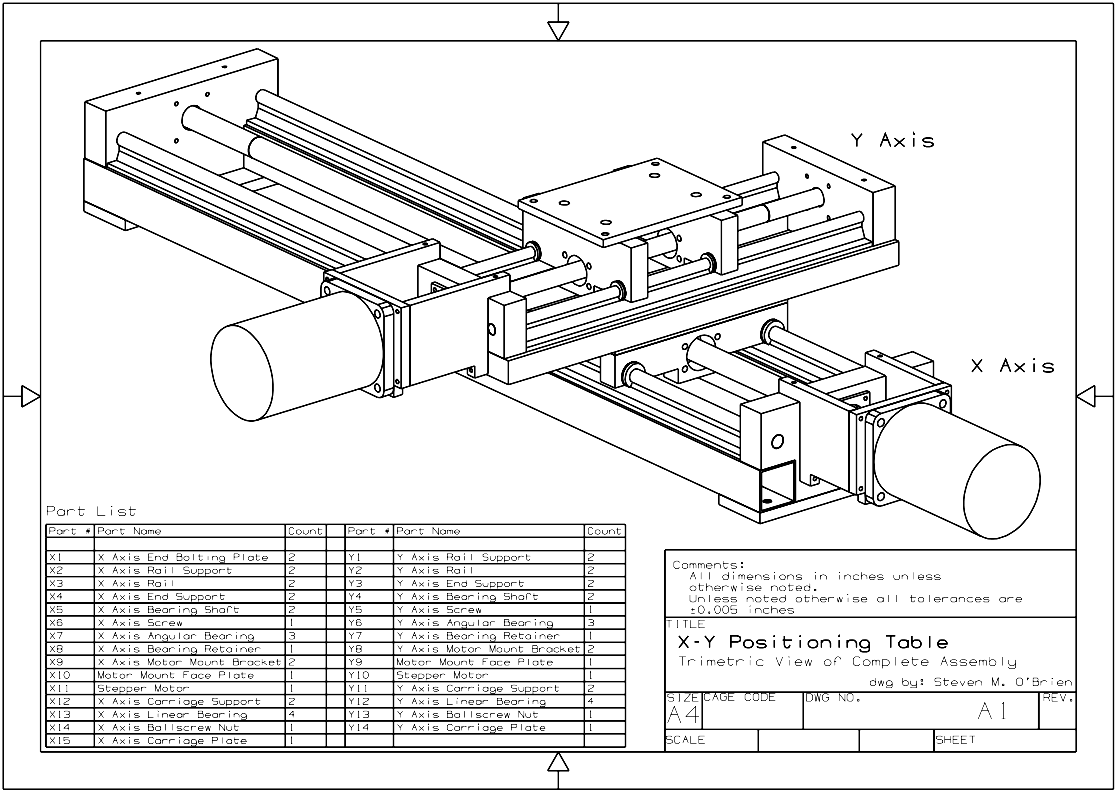
XY Table
Under fabrication is a two degree-of-freedom XY positioning table that will be integrated with the current 3-PRS, giving a total of five degrees-of-freedom. The XY table will have two independent axes, both of which will be actuated, to allow a workpiece (attached to the y-axis) to be oriented at any position within the axis limits. However, since the XY table and the 3-PRS manipulators will both be moving within their own range of limits there must be a computer program created which will control both manipulators in a manner that allows the workpiece to be oriented properly. Thus, the entire system will act primarily as a CNC machine for use in the labratory.

PUMA 560
The PUMA 560 is one of the most common serial manipulators in robotics and industry. Six individual revolute joints give the Puma 560 six degrees-of-freedom, allowing the end effector of the manipulator to reach all points, except singularities, with multiple positions. Typically the manipulator can reach a given point in four poses: right elbow up, right elbow down, left elbow up, and left elbow down.
Scorbot-ER V
Scorbot-ER V is a serial manipulator with six degrees of freedom, similiar to the Puma 560, mostly used for path planning. However, the Scorbot-ER V in the RaM lab is modified to utilize seven degrees-of-freedom; a rail was constructed on the base of the Scorbot to allow the entire manipulator to move, making the workspace of the manipulator larger than usual.