Team members
- Dr. Juan A. Carretero
- Dr. Bradley J. Buckham
- André Roy
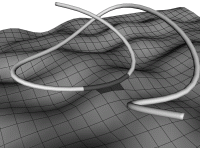
Currently, the only viable means of providing power and maintaining human control during underwater ROV operation is through the vehicle's tether. Due to the high cost of ROVs and their tethers as well as potential risks to equipment and personnel, a realistic simulator is needed to train their pilots. To accurately simulate the tether, it is important to detect collisions of the tether with the environment and with itself as well as to calculate the forces involved. The aim of this work is to present a computationally efficient and accurate method of detecting tether self-contact. To this end, a combinatorial global optimisation method is first used to determine the approximate separation distances. Then, a local optimisation scheme is used to find the exact separation distance and the location of the closest points. This information can then be used to determine whether or not a collision has occurred. If a collision is detected, a force is applied at the collision site to maintain separation.