Group members
- Dr. Juan A. Carretero
- Chris van Driel
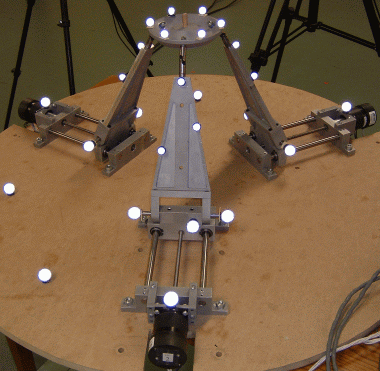
A kinematic calibration method for the 3-PRS parallel manipulator using a motion capture system was developed. Kinematic calibration is used to accurately determine the kinematic parameters of the manipulator's model to improve the accuracy of the mechanism.
The calibration of the 3-PRS manipulator is examined by identification of the manipulator's kinematic parameters, an introduction to the motion capture system used, a presentation of the calibration method itself, and an examination of the results. The calibration method initially determines the joint locations and orientations, from which the remaining kinematic parameters can be resolved. Computer and physical models of the 3-PRS are used to verify the validity of the calibration method. An analysis of the precision and accuracy of the motion capture system is also presented. Although the computer model indicates the method is valid, results from the physical calibration present poorer than expected results due to larger deflections inherent to the manipulator's construction.